
خودروهای برقی به دلیل اینکه آرایشهای مکانیکی پیچیده در راهاندازی خودروهای معمولی را ندارند، کاملا منعطف هستند. خودروهای برقی تنها یک بخش متحرک دارند که موتور آنهاست. منبع تغذیه لازم برای موتورها میتواند از منابع گوناگونی تامین شود. موتور و منبع تغذیه اگر به وسیله سیمهای الکتریکی به یکدیگر وصل شوند، قابل جایگذاری در بخشهای مختلف خودرو هستند. بعلاوه، همانطور که بیان کردیم، خودروهای برقی یا منحصرا با برق حرکت میکنند یا از EM و ICE با هم استفاده میکنند. این قابلیت انعطاف در پیکربندی ECUها، راه را برای پیکربندیهای مختلف براساس نوع خودرو هموار کردهاند. در این مقاله از تیران آکادمی، درباره پیکربندی خودروهای برقی با شما سخن میگوییم.
در حالت کلی، خودروهای برقی را میتوان سیستم هایی شامل سه زیر سیستم در نظر گرفت: یک منبع انرژی، زیر سیستم پیشرانش و زیرسیستم کمکی. منبع انرژی شامل تامین انرژی، سیستم شارژ، سیستم مدیریت انرژی و سیستم ذخیرهسازی است. سیستم پیشرانش نیز از EM، مبدلهای توان، کنترل کنندهها، جعبه دنده و چرخهای متحرک تشکیل میشود. زیرسیستم کمکی از سه بخش تشکیل میشود: یک منبع توان کمکی، یک سیستم کنترل دما و یک واحد فرمان خودکار. در شکل 6 نگاهی کلی به این زیر سیستمها داده شده است.
پیکانها در این شکل جریان این قطعات را نشان میدهند. برخی از ویژگیها مانند ترمز احیا کننده می توانند جریان برق رو به عقب تولید کنند. بیشتر باتری های خودروی برقی و ابرخازنها/ چرخ لنگرها (UCs/FWs) اغلب با این استراتژیهای بازتولید انرژی سازگار هستند. چیدمان موتور درون چرخی به گونهای است که به موتور مرکزی، جعبه دنده، دیفرانسیل، مفاصل همسویی و محور محرک نیازی نیست و وزن سیستم محرک را به طور موثری کاهش میدهد. ویژگیهای دیگر شامل فرمان ارتقایافته و ظرفیت بزرگتر برای باتریهای ذخیره کننده، سلولهای سوختی یا بار است. با این وجود در این پیکربندی به سیم های اتصال دهنده موتور و سیستمهای توان و کنترل نیاز است که ممکن است در اثر سختی محیط اطرافشان، لرزش یا شتاب آسیب ببینند. در سیستم موتور درون چرخی بیسیم (W-IWM) ارائه شده است و با استفاده از این معماری، به طور آزمایشی در یک ماشین آزموده شد. آنها این سیمها را با دو سیم پیچ که میتوانند توان را بین خود انتقال دهند، جایگزین کردند. در شکل 7 پیکربندی موتور درون چرخی نشان داده شده است. شکل 8 راندمان این سیستمها را در مراحل مختلف نشان میدهد. در این شرایط می توان مشکلات مربوط به ناهم محور بودن را با استفاده از تزویج رزونانس مغناطیسی که باعث انتقال توان بیسیم (WPT) میشود، برطرف کرد. توان مبدل ثانویه نیز می تواند به کنترل کننده که با ولتاژ بخش ثانویه تغییر میکند، اعمال شود. WPT هنگام استفاده از توان 2 کیلووات ممکن است به راندمان انتقال 90% در هر دو جهت به دلیل تزویج رزونانس مغناطیسی دست یابد. در نتیجه، W-IWM با ترمز احیا کننده سازگار است.
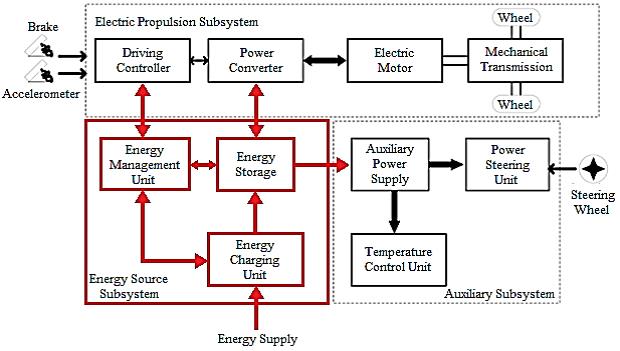
شکل 6: زیرسیستمهای خودروهای برقی
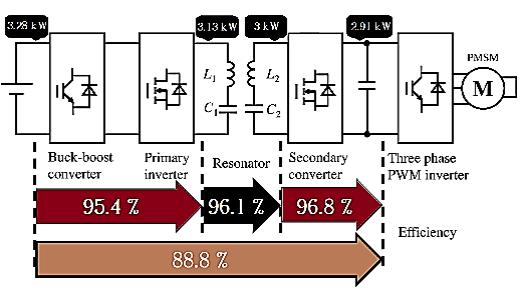
شکل 8: پیکربندی W-IWM نشان دهنده عملکرد با 100% گشتاور
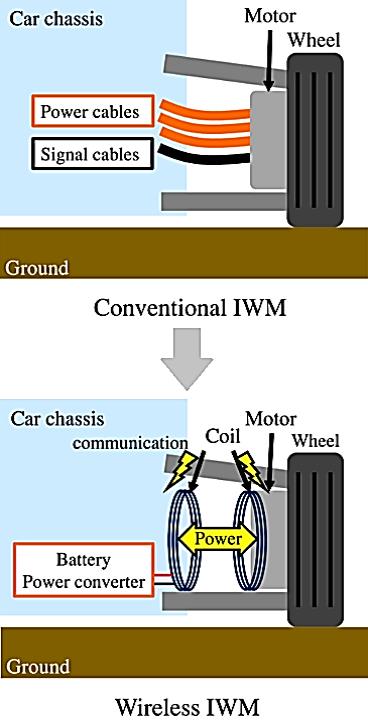
شکل 7: IWM بیسیم و معمولی
پیکربندی HEV
HEV ها هر دو سیستم ICE و پیشرانش الکتریکی را دارند. پیکربندیهای مختلف این خودروها براساس چگونگی تنظیم شدنشان به چهار دسته تقسیم میشوند.
- پیکربندی هیبریدی سری
- پیکربندی هیبریدی موازی
- پیکربندی هیبریدی سری – موازی
- پیکربندی هیبریدی مختلط
پیکربندی هیبریدی_سری
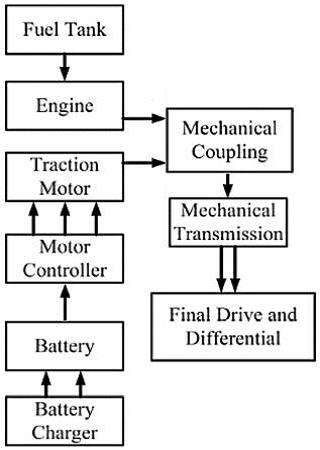
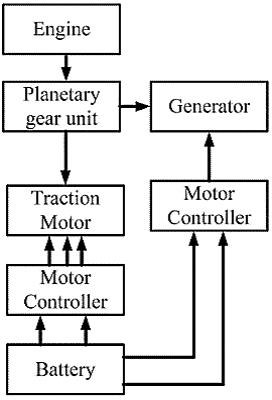
این پیکربندی آسانترین نوع پیکربندی در یک HEV است، زیرا چرخها فقط به موتور متصل هستند. موتور ژنراتوری را که برق تولید میکند، تغذیه میکند. به طور ساده میتوان آن را یک HEV با یک ژنراتور ICE دانست. شکل 9 سیستم محرکه این نوع پیکربندی را نشان میدهد. دلایل موافق و مخالف این نوع پیکربندی در جدول 2 آورده شده است.
پیکربندی هیبریدی_موازی
این نوع پیکربندی EM و ICE را پشت سر هم به چرخها وصل میکند. هرکدام از آنها میتوانند نیرو تولید کنند و بنابراین یک خودروی با موتور ICE کمک الکتریکی است ]6[. در این نوع وسیله نقلیه، EM میتواند ذخیره انرژی را به کمک ICE یا ترمز احیا کننده شارژ کند. در شکل 10 پیکربندی سیستم محرکه هیبریدی موازی نشان داده شده است. درجدول 3 دلایل موافق و مخالف این ساختار بیان شده است و در جدول 4 دو سیستم هیبریدی سری و موازی با هم مقایسه شدهاند.
شکل 10: پیشرانه سیستم 30

شکل 9: پیشرانه سیستم هیبرید سری
جدول 2: دلایل مخالف و موافق پیکربندی EV هیبریدی سری
| شماره | دلایل موافق | دلایل مخالف |
| 1 | امکان ساختن نیروگاه قطعه ای و کارآمدتر | نیاز به داشتن سیستم محرک کششی بزرگ و پیاده سازی مناسب الگوریتم |
| 2 | بهینه شدن سیستم نیرو محرکه | وجود چندین مرحله تبدیل انرژی |
| 3 | فرصت تبادل سریع سرویس "جعبه سیاره" | |
| 4 | داشتن فناوری بلندمدت و تثبیت شده | |
| 5 | انتشار صفر | |
جدول3: دلایل مخالف و موافق پیکربندی PHEV
| شماره | دلایل موافق | دلایل مخالف |
| 1 | امکان دستیابی به انتشار صفر | گران قیمت |
| 2 | مقرون به صرفه | کنترل سخت |
| 3 | قابلیت انطباق زیاد | نیاز به ولتاژ بالا برای کارکرد درست |
جدول 4: مقایسه ساختارهای PHEV و SHEV
| پارامترها | PHEV | SHEV |
| ولتاژ (V) | 300، 144، 42، 14 | 900، 550، 350، 300، 274، 216 |
| توان (kW) | 3-4 | > 50 |
| بهره نسبی در صرفه جویی سوخت (%) | 5-4 | > 75 |
پیکربندی هیبریدی موازی
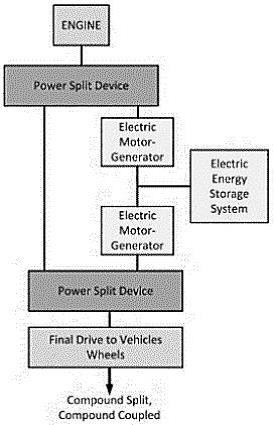
سیستم EV هیبریدی سری موازی (SPHEV) از ترکیب پیکربندیهای هیبریدی سری و هیبریدی موازی به وجود می آید. در این شیوه مزایای هر دو لحاظ میشود. اما دشوارتر و گران قیمت است. پیچیدگیهای این پیکربندی تا حدودی به دلیل واحد چرخ دنده سیاره ای است ]30[. در شکل 11 پیکربندی یک چرخ دنده سیاره ای نشان داده میشود. در اینجا چرخ دنده خورشیدی به یک ژنراتور، چرخ دنده حلقه ای به محور خروجی، حامل سیاره ای به موتور احتراق داخلی وصل است و جعبه دنده جناحی اتصال را در سرتاسر سیستم حفظ میکند. ماشین ترانس نسخه ساده تری است که موتور آن به استاتور و روتور آن از طریق چرخ دنده ها به پیشرانه متصل است ]30[. پیکربندی یک پیشرانه هیبریدی سری موازی با واحد چرخ دنده سیاره ای در شکل 12 نشان داده میشود. در شکل 13 سیستم تعویض موتور ترانس نشان داده میشود.
پیکربندی هیبریدی مختلط
در سیستم هیبریدی مختلط برخلاف سیستم هیبریدی سری، امکان جریان توان دوسویه وجود دارد. اصطلاحات فعلی این سیستم را به عنوان یک پیکربندی سری موازی نشان میدهند. این سیستمها، هزینه و پیچیدگی بالایی دارند ]6[. در سیستمهای هیبریدی مختلط، انتقال قدرت متغیر پیوسته (CVT) میتواند تقسیم توان یا انتخاب منبع برای پیشرانش چرخها را تسهیل کند. استفاده از تجهیزات الکتریکی برای این فرآیندها، e- CVT نام دارد که توسط شرکت تویوتا موتور معرفی شده است. CVTها به روشهای مختلفی مانند CVTهای هیدرولیکی، CVTهای مکانیکی، CVTهای هیدرومکانیکی و CVTهای الکترومکانیکی استفاده میشوند. CVTها همچنین از یکی از دو روش تقسیم ورودی و تقسیم پیچیده برای تقسیم توان استفاده میکنند ]30[. در ورودی انتقال قدرت، از مکانیزم تقسیم توان برای تقسیم ورودی استفاده میشود. ماشینهای خاصی از تویوتا و فورد از این مکانیزم استفاده میکنند ]32[. سازندگان مختلف یرای هر دو مکانیزم تقسیم توان، حالات متفاوتی دارند. شکلهای 14 و 15 برخی از این مکانیزمها را نشان میدهند.این نوع HEV های تقسیم توانی شامل موتور، چرخها، دو ماشین الکتریکی و یک جعبه دنده سیاره ای (PG) هستند که به 24 روش میتوان آنها را ترکیب کرد. در حقیقت، با استفاده از PC های دیگر میتوان به بیشتر از هزار روش این کار را انجام داد. یک طراحی بهینه شامل یک PG ارائه شده است ]31[. چرخهای عقب در سیستمهای چهار چرخ متحرک (4WD) به سیستم انتقال قدرت نیاز ندارند، زیرا موتور مخصوص خود را دارند. بنابراین، می توانند پیکربندی هیبریدی دو موتوره را پیاده سازی کنند و از طریق ترمز احیاکننده مجدد انرژی تولید کنند. در شکل 16 یک ساختار 4WD HEV نشان داده شده است. در این پیکربندیها با کنترل موتور عقبی، میتوان پایداری را افزایش داد.
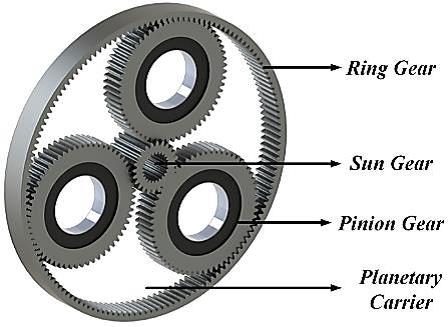
شکل 11: واحد چرخ دنده سیاره ای.
شکل 12: پیشرانه یک سیستم SPHEV با چرخ دنده سیاره ای.
شکل 14: سیستم e- CVT تقسیم ورودی.
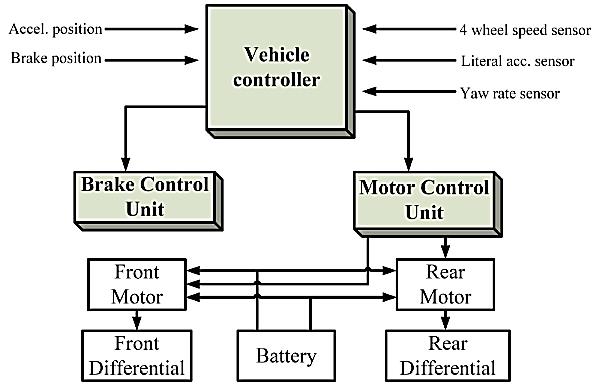
شکل 16: ساختار یک 4WD HEV
منابع انرژی
خودروهای هیبریدی میتوانند منابع مختلف انرژی با معیارهای خاصی داشته باشند. از بین این معیارها، دو تا از مهمترینها چگالی انرژی و چگالی توان هستند. در حقیقت، منبع کامل انرژی به ویژگیهای دیگری مانند شارژ سریع، سرویس و چرخه عمر طولانی مدت، هزینه کم و نگهداری آسان نیز نیاز دارد. در رانندگیهای طولانی، انرژی ویژه بالا لازم است، درحالیکه توان ویژه بالا باعث بهبود در رانندگی های کوتاه میشود. منبع ایده آل به ویژگیهای مختلفی نیاز دارد، بنابرین بسیاری از سیستمهای ذخیره انرژی (ESS) با ترکیبات مختلف برای برآوردن نیازهای مختلف بحث خواهند شد.
باتری
باتریها برای زمانی طولانی، منبع اصلی انرژی برای خودروهای برقی بودند. در واقع از فناوری های دیگری نیز در نهایت استفاده میشد. انواع باتری های مشهور در آن زمان، باتری های اسید سربی، Ni-Cd، Ni-Zn، Ni-MH، Li-polymer و Li-ion بودند. مزیت باتری های گرافن برای خودروهای برقی و همچنین مدلهای ساختاری و پیاده سازی آنها. هر نوع باتری موافقان و مخالفان خود را دارد. در جدول 5 ویژگیهای اصلی چند نوع از باتری ها آورده شده است. جدول 6 باتریهای رایج را براساس مزایای آنها نسبت به یکدیگر به طور متقابل بررسی کرده است.
جدول 5: انواع نوعی باتریها، اجزای اصلی آنها، مزایا و معایب.
| نوع باتری | اجزا | ویژگیها | معایب |
| اسید سربی | - الکترود منفی یک سرب قابل انعطاف است (NE) - الکترود مثبت: اکسیداسیون سرب (PE) - الکترولیت: اسید سولفوریک تقطیر شده | - توان مالی از نظر حجم ساخت - قیمت به نسبت ارزان - فناوری کامل که بیش از 50 سال در حال استفاده است | - محدود به حداکثر 20% ظرفیت آن است - اگر میزان تخلیه باتری زیاد باشد و از آن استفاده شود، عمر آن کم میشود - چگالی کم توان و انرژی - وزن سنگینتر |
| نیکل متال هیدرید (NiMH) | - امکان استفاده از نیکل و تیتانیوم به همراه وانادیم برای تشکیل NE - هیدروکسید نیکل به عنوان PE - محلول قلیایی به عنوان یک الکترولیت | - چگالی انرژی دو برابر باتری های اسید سربی - سازگار با محیط زیست - قابل بازیافت - ایمنی عملیاتی در ولتاژ بالا - قابلیت ذخیره توان و انرژی حجمی - طول عمر بالا - بازه دمای عملیاتی وسیعتر - مقاوم دربرابر شارژ و تخلیه زیاد | - در جریانهای بار بالا، عمر باتری تقریبا 200 الی 300 چرخه کاهش مییابد - به دلیل اثر حافظه، توان مفید کاهش یافته است |
| لیتیوم یون | - NEاز کبالت اکسید شده و PE از کربن دست می آید - محلول نمک لیتیوم در یک حلال آلی به عنوان الکترولیت | - NiMH چگالی انرژی دوبرابر دارد - عملکرد در دمای بالا - قابل بازیافت - اثر حافظ اندک - توان ویژه به شدت بالا - انرژی ویژه بالاتر - عمر باتری حدود 100 چرخه است | - گران قیمت - زمان طولانی برای شارژ شدن، اگرچه از بسیاری از دیگر باتریها سریعتر است |
| نیکل زینک (Ni-Zn) | - زینک به عنوان NE - اکسید هیدروکسید نیکل به عنوان PE | - چگالی انرژی و توان بالا - استفاده از مواد ارزان قیمت - قابلیت چرخه کاری طولانی - دوام پذیری در محیط زیست - قابل استفاده در دماهای بین 10- تا 50 درجه سلسیوس | - توسعه دندریت آن بالاست و همین مانع استفاده از آن در ماشینها میشود |
| نیکل کادمیوم (Ni-Cd) | -کادمیوم به عنوان NE - نیکل هیدروکسید به عنوان PE | - عمر مفید طولانی - قابلیت تخلیه کامل بدون آسیب دیدن قابل بازیافت | - کادمیوم اگر به درستی از بین نرود، میتواند محیط را آلوده کند - برای استفاده خودرویی گران قیمت است |
دیدگاه خود را بنویسید