
موقعیتیابی یا (Localization) از جمله موضوعات چالشبرانگیز در توسعه خودروهای خودران است. استفاده از حسگرها و الگوریتمهای پیچیده و فناوریهای نوین، امکان ایجاد نقشههای دقیق و تعیین موقعیت خودروها را فراهم کرده است. موقعیتیابی در خودروهای خودران ساز و کار نوینی دارد، این امکان را میدهد تا خودرو مسیر خود را تعیین کرده و از خطرات اجتناب کنند. در این فصل ازتیران آکادمی در این باره بیشتر بخوانید.
موقعیتیابی خودروهای خودران به زبان ساده
موقعیتیابی خودروهای خودران فرآیندی است که در آن یک خودرو موقعیت خود را در محیط پیرامونش با دقت بالا شناسایی میکند. نقشهبرداری (Mapping) به فرآیند ایجاد نقشههای دقیق از محیط اطراف خودرو گفته میشود. هر دو این فرآیندها برای عملکرد صحیح خودروهای خودران ضروری هستند و به وسیله ترکیبی از حسگرها، الگوریتمها و فناوریهای پیشرفته انجام میشوند.
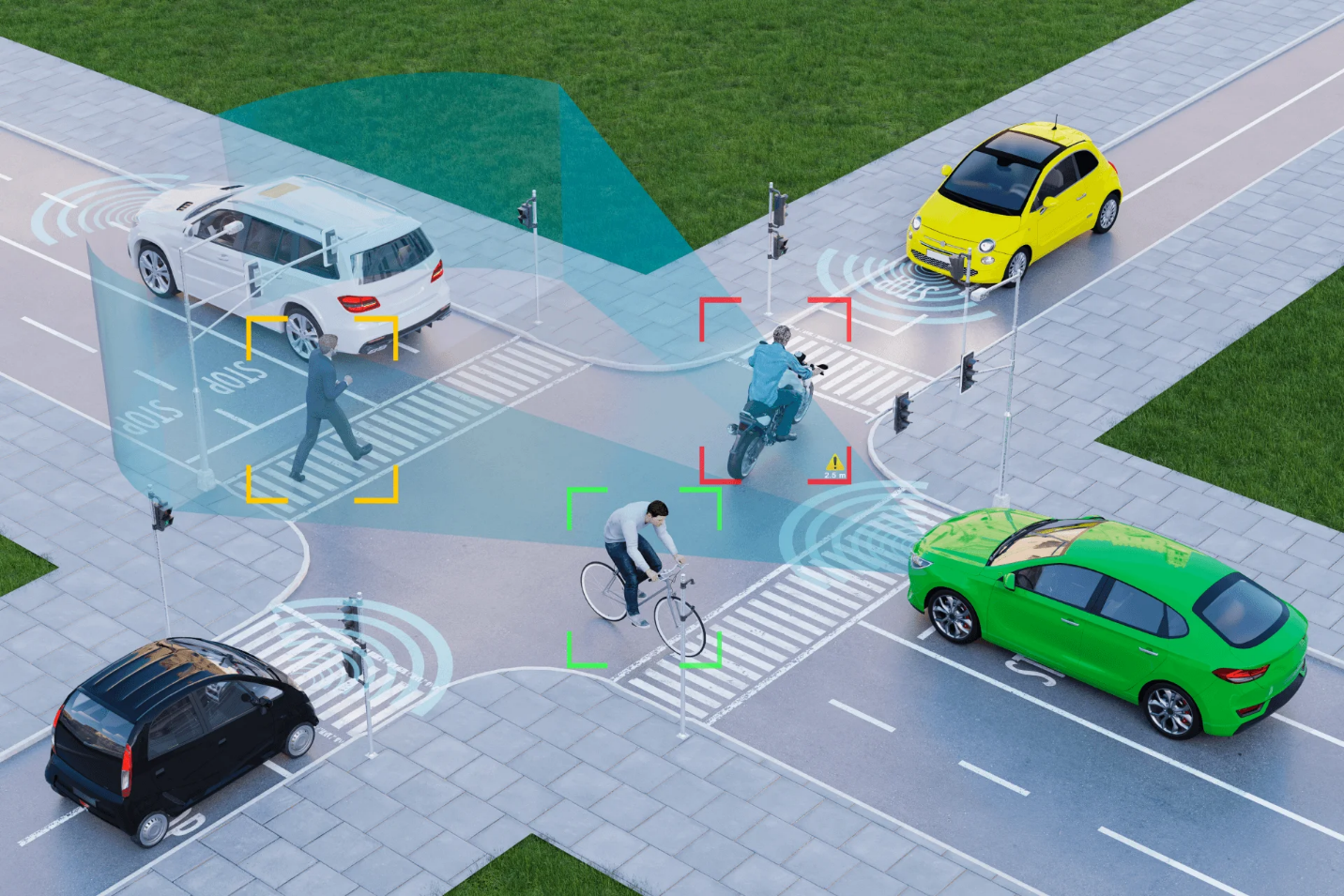
در خودروهای خودران، حسگرها و فناوریهای پیشرفته نقش بسیار مهمی در هدایت و تصمیمگیری دارند. این حسگرها با جمعآوری اطلاعات از محیط اطراف خودرو، امکان موقعیتیابی دقیق و نقشهبرداری پیشرفته را فراهم میکنند. حالا بیایید نگاهی به برخی از مهمترین این حسگرها بیندازیم و ببینیم که چطور به هوشمندتر شدن خودروهای خودران کمک میکنند.
1. حسگرهای لیدار (LiDAR)؛ چشمان تیزبین خودروی خودران!
حسگرهای لیدار مثل چشمان خودرو عمل میکنند، اما با یک تفاوت بزرگ! این فناوری به جای استفاده از نور معمولی، از پالسهای لیزری برای اندازهگیری فاصله و نقشهبرداری سهبعدی استفاده میکند. نحوه کار آن به این شکل است که پالسهای لیزری به سمت اجسام اطراف ارسال میشود و با اندازهگیری زمان بازگشت این پالسها، خودرو میتواند موقعیت دقیق موانع و اشیاء را تشخیص دهد. این اطلاعات برای نقشهبرداری بسیار حیاتی است. با این حال، گاهی اوقات ممکن است حسگرهای لیدار به دلیل نویز یا خطا دچار مشکل شوند. اما جای نگرانی نیست! استفاده از فیلترهای پیشرفته مانند فیلتر کالمن و الگوریتمهای هوشمند تصحیح خطا، میتواند دقت را به شدت افزایش دهد و خطاها را به حداقل برساند.

2. دوربینها؛ دقت تشخیص جزئیات
دوربینهای خودرو خودران، درست مانند چشمان ما، به خودروهای خودران کمک میکنند تا علائم جادهای، موانع و اشیاء را تشخیص دهند. این دوربینها تصاویری از محیط اطراف خودرو ثبت میکنند و این تصاویر به سیستمهای پردازش خودرو فرستاده میشوند تا تحلیل شوند. مثلاً علائم توقف، خطهای جاده، و حتی عابران پیاده با کمک دوربینها شناسایی میشوند. این اطلاعات تصویری بسیار مهم است، چرا که به خودرو امکان میدهد به طور هوشمندانهتر و ایمنتر به شرایط محیطی پاسخ دهد. این دوربینها از فناوریهای ضروری در موقعیتیابی خودروهای خودران هستند.
بیشتر بخوانید: آشنایی با خودروهای خودران، از رویا تا واقعیت!
3. رادارهای خودروهای خودران؛ در هر شرایط جوی
رادار یکی از فناوریهای کلیدی است که خودروهای خودران را قادر میسازد تا در شرایط جوی نامساعد، مثل باران یا مه، به خوبی عمل کنند. این رادارها با استفاده از امواج رادیویی میتواند موانع را تشخیص داده و فاصله آنها را دقیقاً اندازهگیری کند. برخلاف دوربینها که ممکن است در نور کم یا شرایط بد آبوهوا دچار مشکل شوند، رادار تحت تأثیر نور یا شرایط جوی قرار نمیگیرد و به طور مداوم اطلاعات لازم را برای تصمیمگیریهای سریع در اختیار خودرو قرار میدهد. این حسگرها با همکاری یکدیگر خودروهای خودران را به سیستمهای پیچیده و هوشمندی تبدیل کردهاند که میتوانند به صورت مستقل در جادهها حرکت کنند.
چه الگوریتمهایی در موقعیتیابی خودروهای خودران به کار رفتهاند؟
الگوریتمهای موقعیتیابی و نقشهبرداری در خودروهای خودران، نقش محوری و حیاتی دارند. این الگوریتمها به خودروها امکان میدهند تا بهطور دقیق محیط اطرافشان را درک کنند و مسیری امن و بهینه را انتخاب کنند.
1. الگوریتمهای SLAM؛ مسیریابی و نقشهبرداری همزمان
تصور کنید در حال حرکت در یک شهر جدید هستید و هیچ نقشهای در دست ندارید. اما با هر قدمی که برمیدارید، نه تنها موقعیت خود را شناسایی میکنید، بلکه نقشهای از مسیرهای پیش رو هم میسازید. این همان کاری است که الگوریتمهای SLAM برای خودروهای خودران انجام میدهند. این الگوریتمها به خودرو اجازه میدهند که همزمان با حرکت در مسیر، موقعیت خود را با دادههای حسگرهای مختلف ترکیب کرده و نقشهای دقیق از محیط پیرامونش بسازد. این ترکیب دادهها و استفاده از روشهای ریاضی پیچیده باعث میشود تا خودرو بتواند درک بهتری از محیط داشته باشد و در مسیرهای پیچیده یا ناشناخته با دقت بیشتری حرکت کند.
2. الگوریتمهای فیلتر کالمن؛ کاهش خطاها و افزایش دقت
فیلتر کالمن مانند یک دستیار دقیق برای خودروهای خودران عمل میکند. حسگرها همیشه دقیقترین دادهها را ارائه نمیدهند؛ گاهی اوقات دادهها به دلایل مختلف، مانند نویز محیطی یا تغییرات ناگهانی، دچار خطا میشوند. اما فیلتر کالمن با ترکیب دادههای مختلف و فیلتر کردن نویزها، خودرو را قادر میسازد تا بهترین تخمین از موقعیت خود را داشته باشد. به عبارتی، این الگوریتم خطاها را اصلاح میکند و به خودرو کمک میکند تا با دقت بالاتری به حرکت خود ادامه دهد.
بیشتر بخوانید: با سطوح مختلف خودروهای خودران آشنا شوید

3. الگوریتمهای یادگیری ماشین و شبکههای عصبی
الگوریتمهای یادگیری ماشین و شبکههای عصبی دقیقاً همان چیزی هستند که قابلیت موقعیتیابی خودروهای خودران را هوشمندتر و توانمندتر میکنند. این الگوریتمها نه تنها به خودرو کمک میکنند که دادههای پیچیده را پردازش کند، بلکه از الگوهایی که در طول زمان یاد گرفتهاند، برای بهبود عملکرد خود استفاده میکنند. به عنوان مثال، خودرو ممکن است با تحلیل صدها مسیر و شرایط مختلف یاد بگیرد که چگونه در شرایط مشابه بهتر عمل کند. این فرآیند یادگیری مداوم، دقت و کارایی موقعیتیابی و نقشهبرداری را به شکل چشمگیری افزایش میدهد.
چه چالشهایی در موقعیتیابی خودروهای خودران وجود دارد؟
داری دقیق در خودروهای خودران یکی از پیچیدهترین چالشها در دنیای فناوری است. این فرآیندها باید با سرعت و دقت انجام شوند تا خودرو بتواند به درستی در محیطهای متغیر و پیچیده حرکت کند. بیایید نگاهی به برخی از چالشهای اصلی این حوزه و راهحلهای موجود برای غلبه بر آنها بیندازیم.
1. محیطهای پویا و متغیر
تصور کنید که خودرو در حال حرکت در یک خیابان شلوغ است؛ عابران پیاده، خودروهای دیگر و حتی شرایط جوی مانند باران یا مه میتوانند هر لحظه تغییر کنند. این تغییرات باعث میشود تا نقشهای که خودرو در حال استفاده از آن است، بهسرعت منسوخ شود. برای مقابله با این مشکل، خودروهای خودران از حسگرهای چندگانهای مانند دوربینها، رادار و لیدار استفاده میکنند. این حسگرها دادههای مختلفی از محیط جمعآوری میکنند و با کمک الگوریتمهای تطبیقی، خودرو قادر است به سرعت به تغییرات پاسخ دهد و نقشه خود را بهروز کند. به عبارتی، خودرو همیشه بهروز و آماده برای تغییرات ناگهانی است.
بیشتر بخوانید: همهچیز درباره باتری خودروهای برقی
2. محاسبات سنگین و زمانبر
الگوریتمهای پیشرفتهای که برای موقعیتیابی و نقشهبرداری استفاده میشوند، نیازمند محاسبات پیچیدهای هستند. برای فعال کردن موقعیتیابی در خودروهای خودران، این محاسبات میتوانند زمانبر باشند و سرعت واکنش خودرو را کاهش دهند. استفاده از پردازشگرهای قدرتمند و بهینهسازی الگوریتمها از جمله راهحلهایی است که برای این چالش پیشنهاد شده است. این فناوریها باعث میشوند خودرو بتواند در زمان واقعی و با سرعت بالا دادهها را پردازش کرده و تصمیمگیری کند.
نمونههای موفق استفاده از موقعیتیابی در خودروهای خودران
بیایید نگاهی به برخی از نمونههای موفق در استفاده از فناوریهای موقعیتیابی و نقشهبرداری در خودروهای خودران بیندازیم. این شرکتها با استفاده از فناوریهای پیشرفته، خودروهایی را ساختهاند که قادر به حرکت بدون نیاز به راننده و با دقت بسیار بالا هستند.
1. تسلا (Tesla)
تسلا یکی از برجستهترین نامها در حوزه خودروهای خودران است. این شرکت از ترکیبی از حسگرهای لیدار، دوربینها و رادار برای موقعیتیابی و نقشهبرداری استفاده میکند. تسلا با استفاده از الگوریتمهای یادگیری ماشین و شبکههای عصبی عمیق، سیستمهای خود را به گونهای توسعه داده که خودرو بتواند به طور مداوم از محیط یاد بگیرد و دقت خود را بهبود بخشد. به عنوان مثال، تسلا در تشخیص اشیاء، موانع، و حتی تابلوهای راهنمایی و رانندگی به سطحی رسیده که خودروهایش قادر به حرکت در خیابانهای شلوغ و پیچیده هستند.
بیشتر بخوانید: آشنایی با انواع باتری خودروهای برقی
2. خودروهای خودران گوگل (Waymo)
گوگل با پروژه وایمو (Waymo) به یکی از پیشگامان در حوزه خودروهای خودران تبدیل شده است. وایمو با استفاده از فناوریهای موقعیتیابی مانند SLAM (Simultaneous Localization and Mapping) و حسگرهای پیشرفته لیدار، نقشههایی دقیق و سهبعدی از محیط اطراف خودروها ایجاد میکند. خودروهای وایمو در آزمایشات خود توانستهاند با دقت بالا در محیطهای شهری و خیابانهای شلوغ بهصورت خودکار حرکت کنند. این خودروها به خوبی از عهده تشخیص و تفسیر شرایط جادهای برمیآیند و یکی از نمونههای بارز موفقیت در استفاده از موقعیتیابی دقیق محسوب میشوند.
3. خودروهای خودران اوبر (Uber)
اوبر نیز در این رقابت جهانی حضور دارد. خودروهای اوبر از فناوریهای جدید در موقعیتیابی خودروهای خودران استفاده میکنند تا محیط اطراف خود را به دقت شناسایی کنند. اوبر برای بهبود عملکرد سیستمهای خود از الگوریتمهای فیلتر کالمن استفاده میکند. این الگوریتمها به کاهش نویز و خطاهای حسگرها کمک میکنند و از دادههای متنوع برای افزایش دقت استفاده میکنند. خودروهای اوبر توانستهاند در بسیاری از آزمایشات خود عملکرد موفقی داشته باشند، و این نشان میدهد که این فناوریها در آینده نزدیک جایگزین خودروهای سنتی خواهند شد.این نمونهها تنها گوشهای از پیشرفتهای بزرگ در حوزه موقعیتیابی خودروهای خودران هستند، که نوید آیندهای پر از خودروهای هوشمند و خودران را میدهند.
بیشتر بخوانید: هر آنچه که باید درباره شارژ خودروهای برقی بدانید!

پیشرفتهای آینده در موقعیتیابی و نقشهبرداری
بیایید نگاهی به آیندهی هیجانانگیز موقعیتیابی و نقشهبرداری در خودروهای خودران بیندازیم. فناوریهایی که امروز میبینیم تنها شروعی برای تحولات گستردهتر هستند، و آنچه در آینده پیش رو داریم، به مراتب شگفتانگیزتر خواهد بود.
بیشتر بخوانید: آشنایی با انواع باتری خودروهای برقی
1. حسگرهای پیشرفتهتر: انقلابی در دقت
تصور کنید خودروها با حسگر هایی بسیار دقیقتر از امروز مجهز شوند. حسگرهای جدیدی که به لطف فناوریهای نوین مانند فوتونیک و کوانتوم طراحی میشوند، میتوانند دقت فوقالعادهای به خودروها ببخشند. این حسگرها به خودروها اجازه میدهند تا حتی در شرایط پیچیدهای مثل بارش سنگین یا نور کم، محیط را با وضوح و دقت بیشتری درک کنند. در نتیجه، نقشهبرداری و موقعیتیابی در هر لحظه دقیقتر و سریعتر خواهد بود.
2. الگوریتمهای هوش مصنوعی و یادگیری عمیق: مغز پشت فرمان
هوش مصنوعی و یادگیری عمیق نقش حیاتی در آیندهی خودروهای خودران ایفا میکنند. با استفاده از این الگوریتمها، خودروها قادر به تجزیه و تحلیل حجم عظیمی از دادههای حسگرها هستند. خودروها به مرور زمان یاد میگیرند که چگونه به بهترین شکل ممکن با محیط پیرامون خود تعامل کنند. این سیستمهای هوشمند میتوانند الگوهای پیچیده را شناسایی کنند و حتی در شرایط چالشبرانگیز، بهترین مسیرها را انتخاب کنند.
3. فناوریهای ارتباطی پیشرفته: همگامی خودروها و زیرساختها
در آیندهای نزدیک، فناوریهایی مانند 5G و V2X (ارتباط خودرو با همه چیز) خودروها را قادر میسازند تا نهتنها با یکدیگر، بلکه با زیرساختهای جادهای ارتباط برقرار کنند. تصور کنید خودروها بتوانند اطلاعاتی را دربارهی ترافیک، تصادفات یا شرایط جوی با دیگر خودروها بهصورت آنی به اشتراک بگذارند. این تبادل دادهها به افزایش ایمنی و دقت موقعیتیابی و نقشهبرداری کمک شایانی خواهد کرد.
بیشتر بخوانید: تاریخچهای مختصر از وسایل نقلیه برقی

پروژههای تحقیقاتی: پنجرهای به آینده
پروژههای تحقیقاتی مختلفی در سطح جهان در حال کار بر روی خودروهای خودران هستند. بیایید چند نمونه از آنها را بررسی کنیم.
1. پروژه DARPA Urban Challenge: میدان نبرد فناوری
این رقابت که توسط آژانس پروژههای تحقیقاتی پیشرفته دفاعی آمریکا (DARPA) برگزار میشود، به محلی برای آزمایش پیشرفتهترین فناوریها تبدیل شده است. هدف اصلی این پروژه توسعه الگوریتمهای موقعیتیابی و نقشهبرداری است که در محیطهای شهری شلوغ به کار میروند. هر ساله تیمهای متعددی از سراسر جهان در این رقابت شرکت میکنند و آخرین دستاوردهای خود را به نمایش میگذارند.
بیشتر بخوانید: کاربرد یادگیری عمیق در خودروهای متصل
2. پروژه CityMobil2
این پروژه اروپایی با هدف تست و توسعه موقعیتیابی خودروهای خودران در محیطهای شهری طراحی شده است. در این پروژه، فناوریهای پیشرفتهی حسگرها و الگوریتمهای موقعیتیابی و نقشهبرداری استفاده میشود تا خودروها بتوانند در خیابانهای شهرهای اروپا بدون دخالت انسان حرکت کنند. CityMobil2 گامی بزرگ به سوی آیندهی شهری هوشمند است.
3. پروژه Drive Me
شرکت ولوو با همکاری دانشگاهها و مراکز تحقیقاتی مختلف پروژه Drive Me را آغاز کرده است. این پروژه با هدف توسعه و تست موقعیتیابی خودروهای خودران در شرایط واقعی جادهای انجام میشود. آزمایشهای واقعی در جادهها به خودروها کمک میکند تا خود را با شرایط دنیای واقعی سازگار کنند و تکنولوژیهای جدید را به بهترین شکل بهکار بگیرند.
آیندهی خودروهای خودران پر از نوآوریها و پیشرفتهای شگفتانگیز است. هر روز که میگذرد، ما به تحقق این رویا نزدیکتر میشویم، و این فناوریها نویدبخش آیندهای با جادههایی هوشمندتر و ایمنتر هستند. در نهایت، با توجه به روند رو به رشد فناوریهای خودروهای خودران، آیندهای روشن برای حمل و نقل هوشمند پیشبینی میشود که بهبود ایمنی، کاهش ترافیک و افزایش کارایی را به همراه خواهد داشت.
بیشتر بخوانید: معرفی زیرساختهای به کار رفته در خودرو متصل
سوالات متداول
1. موقعیتیابی خودروهای خودران چگونه کار میکند و چه حسگرهایی در این فرآیند استفاده میشوند؟
موقعیتیابی خودروهای خودران با استفاده از حسگر هایی مانند لیدار، دوربین، و رادار انجام میشود. این حسگرها اطلاعات محیطی را جمعآوری کرده و با ترکیب دادهها، موقعیت دقیق خودرو و موانع پیرامون شناسایی میشود.
2. الگوریتمهای موقعیتیابی خودروهای خودران چگونه دقت و ایمنی را بهبود میبخشند؟
الگوریتمهایی مانند SLAM و فیلتر کالمن با ادغام دادههای حسگرها، خطاها را کاهش داده و نقشه دقیقی از محیط ایجاد میکنند. این فرآیند باعث میشود خودرو مسیرهای بهینهتر و ایمنتری را انتخاب کند.
3. چالشهای اصلی در موقعیتیابی خودروهای خودران چیست و چه راهحلهایی برای آنها وجود دارد؟
چالشهای موقعیتیابی شامل محیطهای پویا و تغییرات سریع است. راهحلها شامل استفاده از حسگرهای چندگانه و الگوریتمهای پیشرفته برای پاسخ سریع به تغییرات است.
منابع
1. Thrun, S., Burgard, W., & Fox, D. (2005). Probabilistic Robotics. MIT Press.
2. Cadena, C., Carlone, L., Carrillo, H., Latif, Y., Scaramuzza, D., Neira, J., ... & Leonard, J. J. (2016). Past, present, and future of simultaneous localization and mapping: Toward the robust-perception age. IEEE Transactions on Robotics, 32(6), 1309-1332.
3. Levinson, J., & Thrun, S. (2011). Robust vehicle localization in urban environments using probabilistic maps. In 2010 IEEE International Conference on Robotics and Automation (pp. 4372-4378). IEEE.
4. Ziegler, J., Bender, P., Schreiber, M., Lategahn, H., Kaus, E., Stiller, C., ... & Thrun, S. (2014). Making Bertha drive—an autonomous journey on a historic route. IEEE Intelligent Transportation Systems Magazine, 6(2), 8-20.
5. Gao, J., & Shen, S. (2018). Autonomous navigation in complex environments based on deep learning. Journal of Intelligent & Robotic Systems, 91, 79-101.
6. Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S., Fu, C. Y., & Berg, A. C. (2016). SSD: Single shot multibox detector. In European conference on computer vision (pp. 21-37). Springer, Cham.
7. Chen, X., Ma, H., Wan, J., Li, B., & Xia, T. (2017). Multi-view 3d object detection network for autonomous driving. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (pp. 1907-1915).
دیدگاه خود را بنویسید