
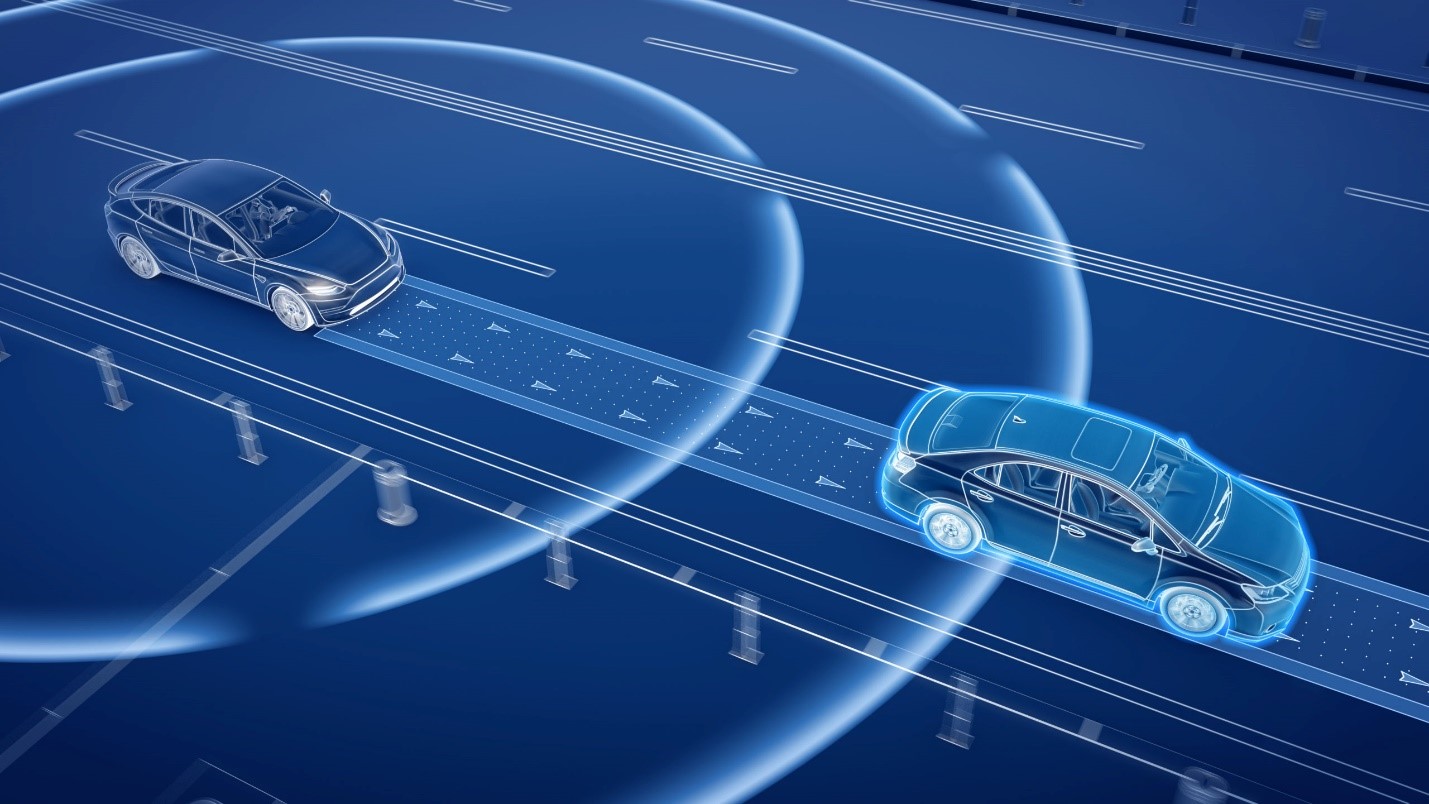
خودروهای خودران (Self-driving cars) به عنوان یکی از نوآوریهای پیشرو در صنعت خودرو، نحوه رانندگی را متحول کردهاند. در این خودروها، سیستمهای کنترل در خودروهای خودران وظیفه حیاتی مدیریت عملیات رانندگی را بر عهده دارند. این سیستمها با تکیه بر هوش مصنوعی و حسگرهای پیشرفته، وظیفه تجزیه و تحلیل دادههای محیطی و تصمیمگیریهای بلادرنگ را بر عهده دارند. سیستمهای کنترل در خودروهای خودران باید با دقت بالایی تصمیماتی مشابه یا حتی بهتر از انسان اتخاذ کنند تا از بروز هر گونه حادثه جلوگیری کنند. در این مقاله از تیران آکادمی، بهطور جامع به سیستمهای کنترل و تصمیمگیری در خودروهای خودران پرداخته و به بررسی معماریها، الگوریتمها و چالشهای اصلی این سیستمها میپردازیم.
1. مقدمهای بر سیستمهای کنترل در خودروهای خودران
در این خودروها، سیستمهای کنترل در خودروهای خودران شامل سه بخش کلیدی هستند: ادراک، برنامهریزی و کنترل. این بخشها با هماهنگی کامل، محیط جاده را درک کرده و مسیرهای بهینه برای حرکت خودرو انتخاب میکنند.
2. ساختار سیستمهای کنترل در خودروهای خودران
سیستمهای کنترل در خودروهای خودران شامل لایههای مختلفی از جمله ادراک و برنامهریزی هستند. لایه ادراک دادههای حسگرها را پردازش میکند، در حالی که لایه برنامهریزی تصمیمگیریهای کلیدی مانند انتخاب مسیر و تعیین سرعت را بر اساس اطلاعات موجود انجام میدهد.
سیستمهای کنترل خودروهای خودران: کلید موفقیت در ایمنی و کارایی
خودروهای خودران به عنوان یکی از مهمترین نوآوریهای قرن، به لطف پیشرفتهای چشمگیر در فناوری و الگوریتمهای هوش مصنوعی، توانستهاند توجه بسیاری از مردم و کارشناسان را به خود جلب کنند. در این مقاله از تیران آکادمی، ما به بررسی سیستمهای کنترل خودروهای خودران و نحوه عملکرد آنها میپردازیم. این سیستمها نه تنها مغز متفکر خودروهای خودران هستند، بلکه مسئول تمامی تصمیمات و اقدامات فیزیکی خودرو نیز میباشند.
لایه کنترل: پایهای برای اجرای تصمیمات هوشمند
سیستمهای کنترل خودروهای خودران در لایه کنترل، وظیفه حیاتی اجرای تصمیمات اتخاذ شده در لایه برنامهریزی را بر عهده دارند. این لایه شامل مکانیزمهای فیزیکی بر اجزای مختلف خودرو مانند موتور، ترمزها، و فرمان است. به عبارت دیگر، این لایه تضمین میکند که خودرو دقیقا مطابق با تصمیمات اتخاذ شده حرکت کند.
در این زمینه، الگوریتمهای کنترل کلاسیک مانند کنترل تناسبی-انتگرالی-مشتقی (PID) همچنان در بسیاری از خودروهای خودران مورد استفاده قرار میگیرند. با این حال، سیستمهای کنترل خودروهای خودران در مواجهه با شرایط پیچیدهتر، نیاز به الگوریتمهای پیشرفتهتری مانند کنترلکنندههای تطبیقی و کنترلکنندههای مقاوم دارند که بتوانند تصمیمات دقیقتری را اعمال کنند.
الگوریتمهای تصمیمگیری: ستون فقرات سیستمهای کنترل
سیستمهای کنترل خودروهای خودران بدون الگوریتمهای پیشرفته تصمیمگیری نمیتوانند به صورت ایمن و کارآمد عمل کنند. الگوریتمهای تصمیمگیری به دو سطح اصلی تقسیم میشوند: سطح بالا و سطح پایین.
تصمیمگیری سطح بالا: مدیریت استراتژیک خودرو
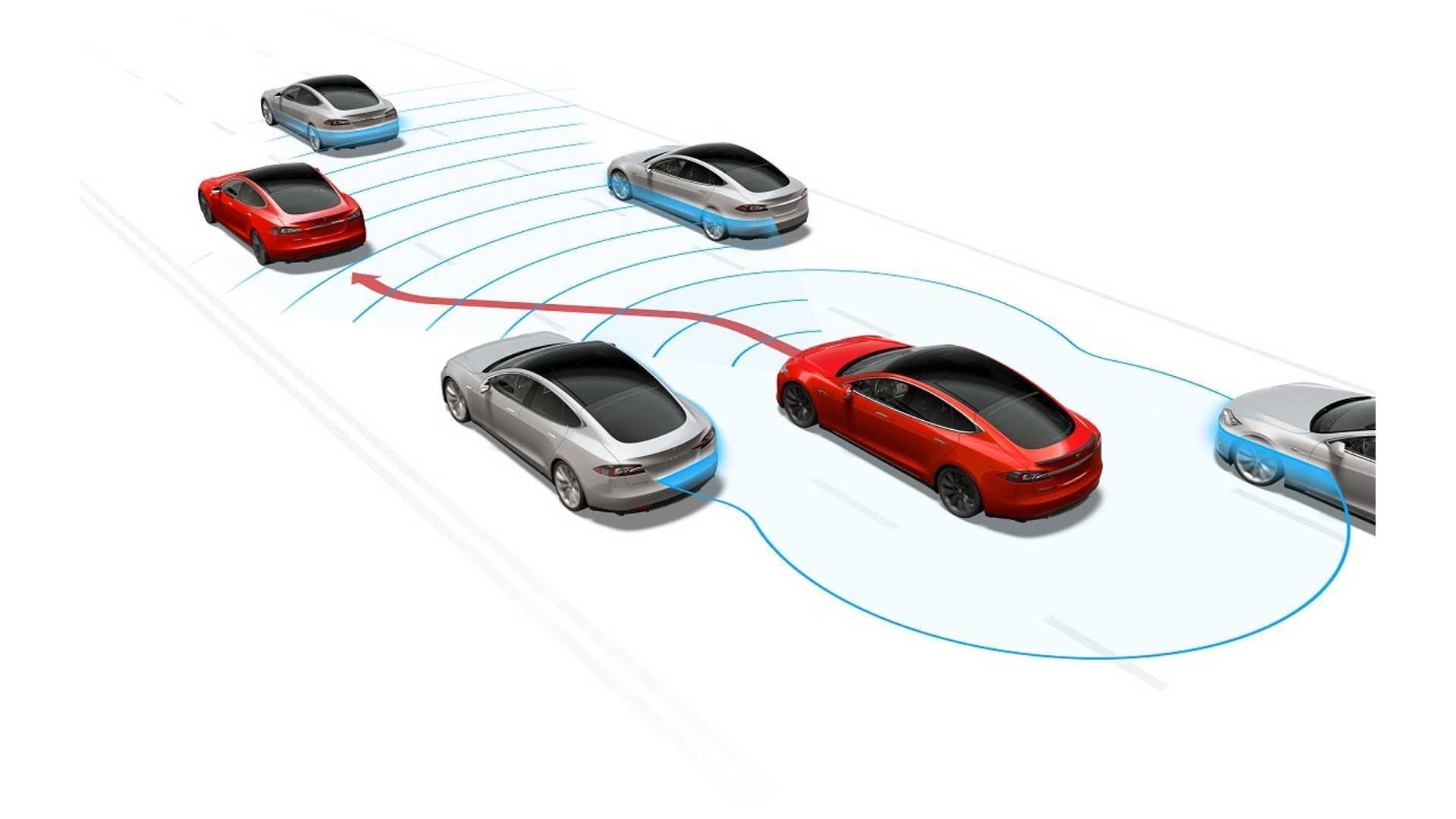
در این سطح، الگوریتمها با تصمیمات کلانتر مانند انتخاب مسیر و مدیریت موقعیت خودرو در ترافیک سر و کار دارند. برای مثال، تصمیمگیری درباره تغییر لاین یا توقف در تقاطعها از طریق یادگیری تقویتی انجام میشود. این رویکرد به سیستمهای کنترل خودروهای خودران کمک میکند تا به صورت استراتژیک رفتار کنند و ایمنی بیشتری را برای سرنشینان فراهم سازند.
 تصمیمگیری سطح پایین
تصمیمگیری سطح پایین
در سطح پایینتر، الگوریتمهای تصمیمگیری باید به تغییرات کوچک و سریع در شرایط محیطی پاسخ دهند. این تصمیمات شامل تغییرات در سرعت، زاویه فرمان و مدیریت دقیق خودرو در حرکت است. کنترلهای مبتنی بر مدلهای پیشبینی (MPC) به سیستم کمک میکنند تا حرکات دقیق و ایمنتری داشته باشد.
چالشها: عبور از موانع پیچیده
سیستمهای کنترل خودروهای خودران علیرغم پیشرفتهای فراوان با چالشهای متعددی مواجهاند. این چالشها به طور مستقیم بر ایمنی و عملکرد خودروها تأثیر میگذارند و نیاز به راهحلهای پیشرفته دارند.
تعامل با عابران پیاده و دیگر خودروها
تعامل با عابران پیاده و سایر وسایل نقلیه یکی از حساسترین چالشها در سیستمهای کنترل خودروهای خودران است. خودرو باید توانایی پیشبینی رفتار عابران پیاده و سایر رانندگان را داشته باشد و تصمیمات ایمنی اتخاذ کند.
مسائل اخلاقی و قانونی
یکی دیگر از چالشهای مهم، مسائل اخلاقی در تصمیمگیری در شرایط اضطراری است. سیستمهای کنترل خودروهای خودران باید در شرایطی که احتمال بروز حادثه وجود دارد، بهترین تصمیم ممکن را بگیرند. همچنین، مسائل قانونی و مسئولیتپذیری در صورت وقوع تصادف نیز از چالشهای قابل توجه است.
آینده در دست سیستمهای کنترل خودروهای خودران: از نوآوری تا تحول
در عصر حاضر، سیستمهای کنترل خودروهای خودران به یکی از مهمترین نوآوریهای صنعت حملونقل تبدیل شدهاند. پیشرفتهای مداوم در هوش مصنوعی، یادگیری ماشین و پردازش دادهها باعث شدهاند تا آینده این سیستمها بسیار روشن به نظر برسد. خودروهای خودران، با استفاده از الگوریتمهای پیشرفته مانند یادگیری عمیق (Deep Learning) و پردازش ابری (Cloud Computing)، نه تنها تصمیمگیریهای پیچیدهتر و دقیقتری انجام میدهند، بلکه امنیت و کارایی آنها نیز به طور چشمگیری بهبود یافته است.
پروژههای پیشگام در توسعه سیستمهای کنترل
چندین پروژه برجسته در تاریخ خودروهای خودران به توسعه سیستمهای کنترل خودروهای خودران کمکهای زیادی کردهاند. یکی از این پروژهها، پروژه "استنلی" از دانشگاه استنفورد بود. استنلی با استفاده از ترکیبی از حسگرهای لیدار (LiDAR) و دوربینها، توانست مسیری 212 کیلومتری را در بیابان بهطور کاملاً خودکار طی کند. این پروژه یکی از اولین نمونههای موفق خودروهای خودران در شرایط واقعی بود و الگوریتمهای آن به عنوان بنیانی برای خودروهای امروزی شناخته میشوند.
پروژه "برتا" که توسط مرسدس بنز توسعه داده شد، نیز یکی دیگر از نمونههای موفق در زمینه سیستمهای کنترل خودروهای خودران است. این خودرو موفق شد مسیری حدود 100 کیلومتر را در جادههای شهری آلمان با استفاده از سیستمهای پیشرفته کنترل و تصمیمگیری طی کند. برتا توانست موانع مختلف و تقاطعها را با دقت شناسایی کرده و به درستی به آنها واکنش نشان دهد.
 چالشها و پیشرفتهای آینده
چالشها و پیشرفتهای آینده
با وجود تمام موفقیتها، سیستمهای کنترل خودروهای خودران همچنان با چالشهای بزرگی مواجهاند. یکی از مهمترین چالشها تعامل با عابران پیاده و سایر وسایل نقلیه است. خودروهای Waymo، یکی از پیشگامان صنعت خودران، توانستند با موفقیت در محیطهای شهری پیچیده مانند خیابانهای پر تردد ایالات متحده مسافتهای طولانی را بدون دخالت انسان طی کنند. در این پروژه از یادگیری تقویتی عمیق برای پیشبینی رفتار کاربران جاده استفاده شد.
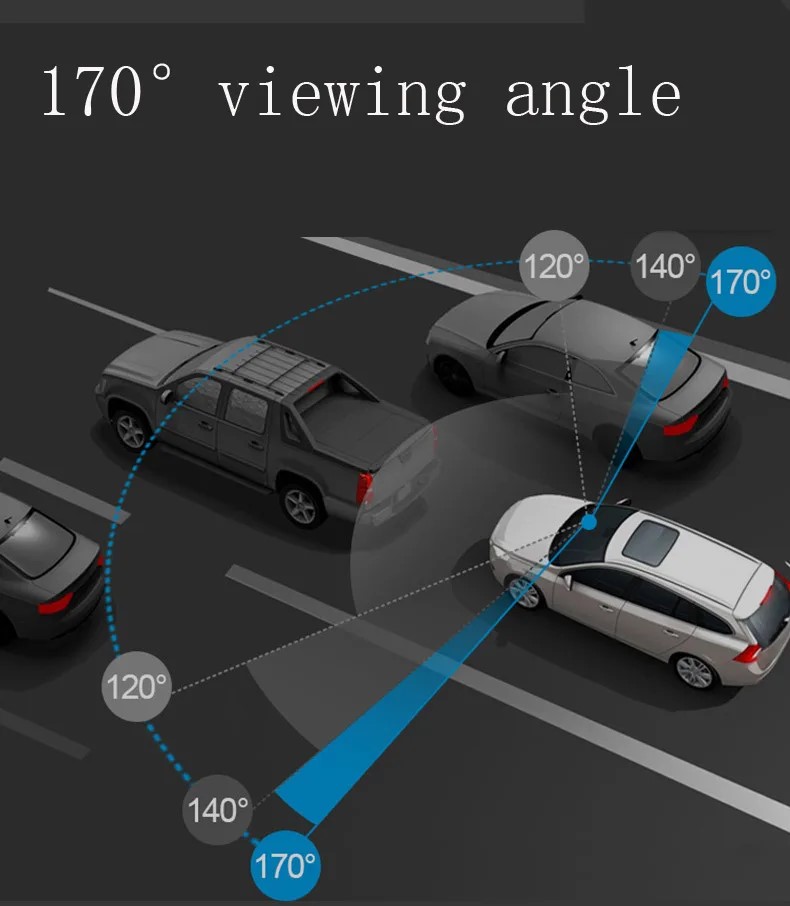
در سوی دیگر، سیستم Autopilot تسلا نیز یکی از شناختهشدهترین نمونهها در سیستمهای کنترل خودروهای خودران است. با وجود برخی چالشها در تصمیمگیریهای اضطراری، این سیستم به کمک دوربینها و رادارهای خود، قابلیتهایی مانند تغییر لاین و پارک خودکار را فراهم میکند.
دیدگاه خود را بنویسید